视觉SLAM十四讲读书笔记:Ch04李群与李代数 (1)
这是我系列博客《视觉SLAM十四讲》的读书笔记中的一篇,总结了第四章“李群与李代数”中有关李群和李代数的定义、转换等基础知识的内容
1. 李群(Lie Group)与李代数(Lie Algebra)基础
1.1 群与李群
群的定义:
一个群
- 封闭性:若
,则 - 结合律:
- 单位元存在:存在单位元
,使得 - 逆元存在:每个
,存在 ,使得
李群的定义:
李群(Lie Group) 是兼具群结构与光滑流形结构的集合。也就是说,群运算
经典例子包括:
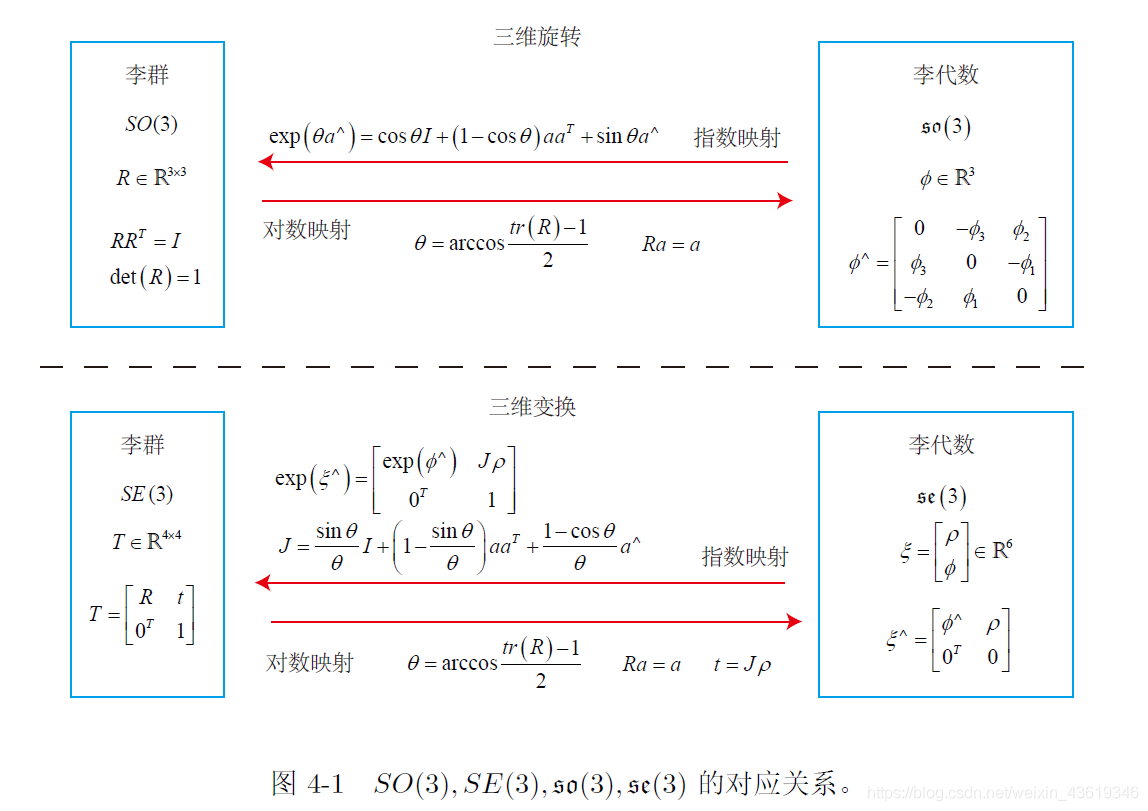
:三维空间旋转群 :三维空间欧氏变换群(旋转 + 平移)
注意:SO(3)、SE(3) 并不在加法下封闭,不能使用向量加法来组合两个旋转/位姿。
2. 从李群引出李代数
2.1 SO(3) 的李代数引出
SO(3) 的定义是:
2.2 李代数(Lie Algebra)的定义
一个李群 GG 对应一个李代数
- 双线性(bilinear)
- 反对称性:
- 雅可比恒等式:
例如,三维向量叉乘就是一种李括号:
2.3 SO(3) 的李代数
记号说明:
- 李群:
- 李代数:
,由所有反对称 实矩阵组成。
定义:
2.4 SE(3) 的李代数
从 SE(3) 的定义出发:
3. 指数映射与Rodrigues公式
3.1 SO(3) 上的指数映射
指数映射定义为:
3.2 对数映射
对数映射是指数映射的逆:
- 指数映射是满射(surjective):每个
都可以表示为某个李代数元素的指数 - 但不是单射(injective):因为
和 映射结果相同
3.3 SE(3) 上的指数映射
设:
推导如下,仍然使用
4. 总结